蓄勢數載業初就 | 生機電一體化穿戴式機器人科研項目一瞥
2019-11-20 15:58:04
來源:新華網

付成龍說:“常見的生機電一體化穿戴式機器人包括機器人動力假肢、負重行走彈性背包機器人和下肢外骨骼機器人等。我們正在研究的機器人動力假肢能夠感知假肢和地面之間的作用反力,這種機器人動力假肢能夠很好地幫助殘障人士恢復運動能力,融入現代生活。”
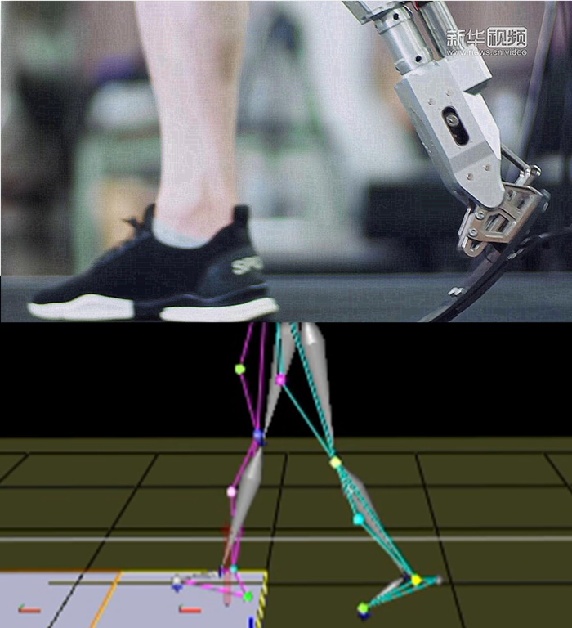
機器人和人體自然運動之間的相容性問題在研究中尤為重要,即主要解決人機運動不協調、步態不自然、行動不靈活等問題。付成龍對此采用了NOKOV(度量)光學三維動作捕捉系統,采集人或其他生物的六自由度(6DoF)的運動軌跡和運動學參數,并將NOKOV(度量)光學三維動作捕捉系統與三維測力平臺、表面肌電儀、足底壓力測量儀等設備同步運行,進行精確的步態分析。付成龍將采集到的運動學數據作為機器人的運動規劃和位姿規劃的基礎數據,解決了相容性問題。